

工件定位工装的设计
工件定位工装主要由工装支座、定位勾、定位架、气缸等组成,工装支座为通用型,根据不同工件更换不同的定位架安装在工装支座上,通过变位机快速卡环将整个工件定位工装与变位机连接;如图4。
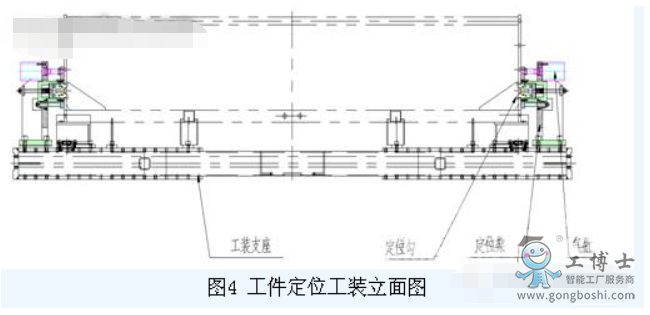
为同时实现工件的定位卡紧,巧妙的利用气缸的伸缩动作,通过弹簧、拉钩,实现了工件的定位卡紧两个动作。通过变异,这一机构被广泛应用在其他工件的定位卡紧中。
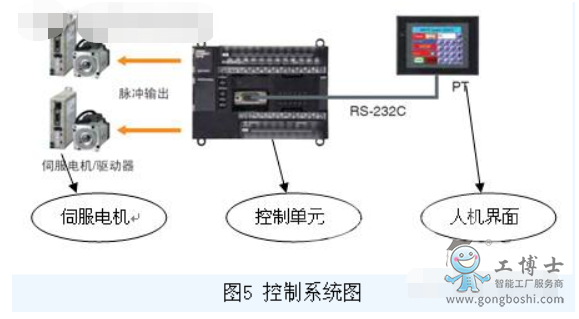
控制系统设计
控制系统揉合了人机界面、伺服闭环驱动、PLC定位模块等主流自动化控制元件,精度得到了保证,操作更便利,维护更简单。
结束语
本文通过对机器人柔性焊接工作站的方案设计以及重要部件变位机、智能搬运器、工件定位工装的设计分析,在控制系统设计过程中揉合了人机界面、伺服闭环驱动、PLC等主流自动化控制元件;并通过PLC与焊接机器人通讯,使得焊接变位机与焊接机器人无缝联接。解决了以下关键技术:
(1)传动采用伺服电机+复式活齿减速器,解决了变位机定位精度的高要求;
(2)解决了控制系统与机器人通讯问题;
(3)解决了工件的快速定位卡紧;
机器人柔性焊接工作站的设计及投入使用,极大的提高生产效率,与人工焊接比较,效率提高了3倍多,并且大大降低了工人的劳动强度。
更多资讯:机器人周边设备